Servo Feetech FS5109R - Standard, Dauerbetrieb 360 Grad
Ik gebruik een servomotor die 360 graden kan blijven draaien. Dit heb ik nodig om mijn wiel aan te drijven. Deze motor is vrij nauwkeurig dit is goed om het juiste gewicht van eten te geven.
Specificatie:
- Voedingsbereik: 4.8V-6V
- Speed: 0.16 s/60°
- Koppel: 9,0 kg*cm (0,9 Nm)
- signaal: PWM
Datasheet:
Servo motor
RTC (real time clock)
De RTC zorgt ervoor dat ik op verschillende tijdstippen eten kan gegeven om dat de RTC tegen de Arduino zegt hoe laat het is.
Specificatie:
- Voedingsbereik: 3.3 - 5.5 V
- Memory chips: AT24C32
- Clock chip: high-precision clock chip DS3231M
- bus: I²C
Datasheet:
RTC
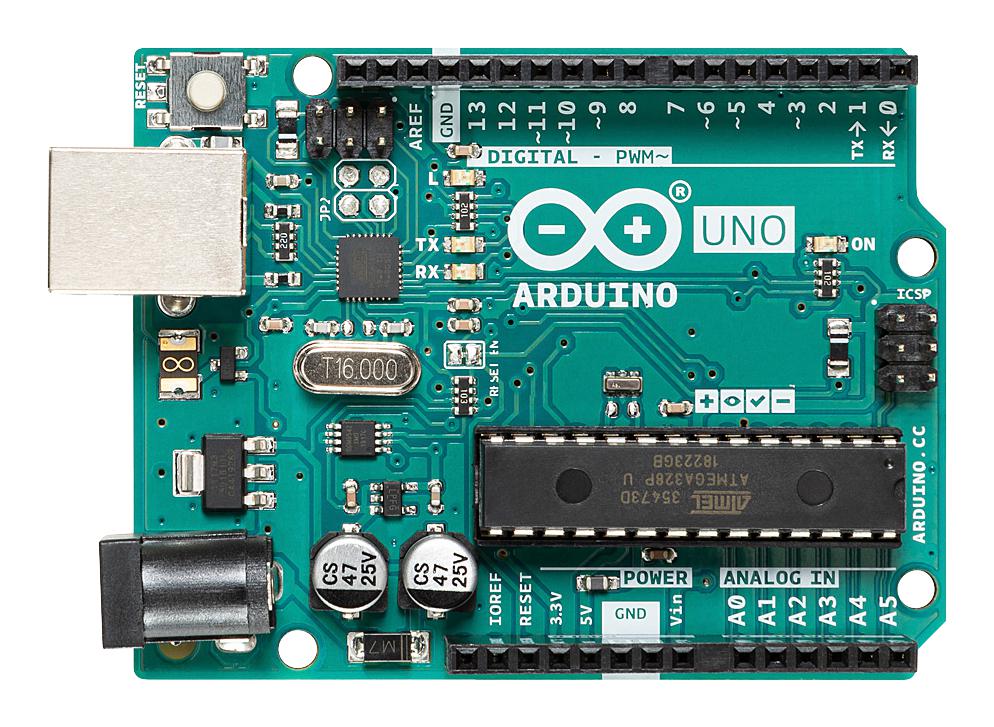
Arduino uno
Ik heb dit gekozen omdat ik dit nodig heb om alles aan te sturen. Ook omdat ik hier al mee gewerkt heb in het 5 middelbaar.
Specificatie:
- Microcontroller: ATmega328P
- Gebruik spanning: 5V
- Ingang spanning: 5-12V
Datasheet:
Arduino uno
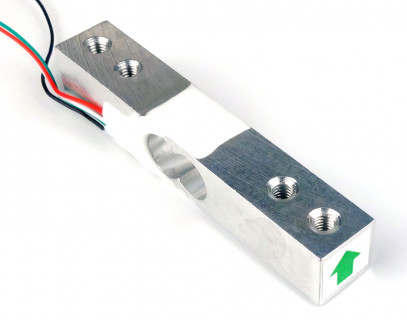
Gewichtssensor
Ik heb de 20kg load cell gekozen omdat deze tot 20kg kan wegen.
Specificatie:
Aansluitdraden:
- Rood: + Excitation
- Zwart: - Excitation
- Groen: + Signaal
- Wit: - Signaal
Datasheet:
Gewichtssensor
Weegcel Versterker
Ik gebruik hx711 weegcel versterker module om de gegevens van de load cell om te zetten naar verstaanbare gegevens in gram of kilogram. Ik heb deze gekozen omdat deze speciaal gemaakt is voor de load cell die ik gekozen heb.
Specificatie:
- Gebruik spanning: 5
- Stroomverbruik: 1.6mA
- ADC Resolutie: 24 bit
Datasheet:
HX711
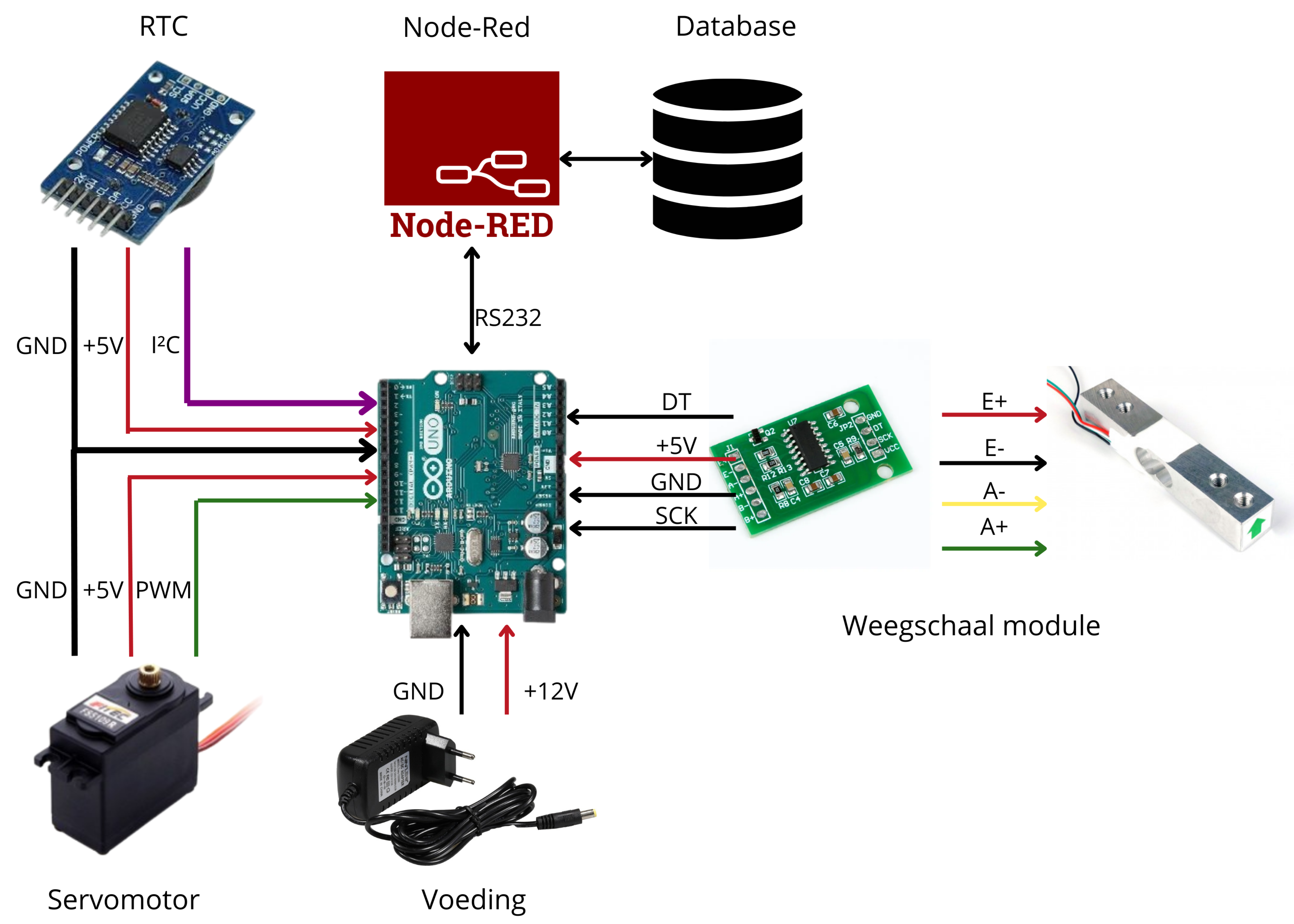
Blokschema hardware
- De voeding zorgt dat als stroom heeft.
- De RTC zorgt dat de Arduino de tijd weet.
- De servomotor laat een soort van scheepsschroef draaien.
- De Node-Red stuurt de data naar de database.
- De weegschaal module zorgt dat de Arduino het gewicht weet.